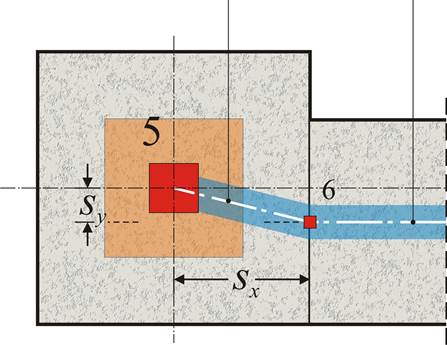
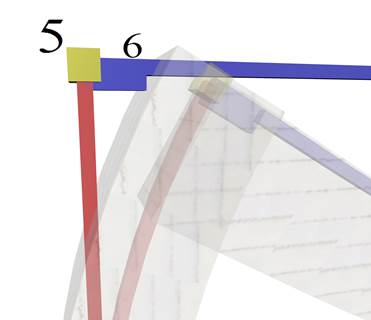
Plan and 3D of column-beam nodes: Master node (5) and slave node (6)
Provided the 6 displacements of the master node are δx, δy, δz, φx, φy, φz, the corresponding δx,s, δy,s, δz,s, φx,s, φy,s, φz,s of the slave node are:
φ x,s = φ x , φ y,s = φ y , φ z,s = φ z , δ x,s = δ x -sy × φ z (given sz=0), δ y,s = δ y +sx × φ z (given sz=0),
δ z,s = δ z -sx × φ y +sy × φ x